 Sideway
BICK BLOG from Sideway
Sideway
BICK BLOG from Sideway
|
Link:http://output.to/sideway/default.asp?qno=140300002 Tangential Motion Kinematics: Tangential MotionIn practical engineering problems, sometimes it is convenient to resolve the component functions of the vector function of motion into components which are tangent and normal to the path of the motion. Thus the study of the motion can be focused on the tangential motion of an object as the velocity vector of the motion of an object is always tangent to the path of the motion of the object. This is only a method to study the motion of a particle along the path not a rigid coordinate system to specify the position of the particle. Tangential and Normal Component FunctionsIn curvilinear motion, when the vector function of motion is resolved into component functions that are tangent and normal to the path of motion, the orientation of the frame of reference of the object changes during the motion along the path. In other words, the reference frame of the object is in translative and rotational motions simultaneously along the path of motion. 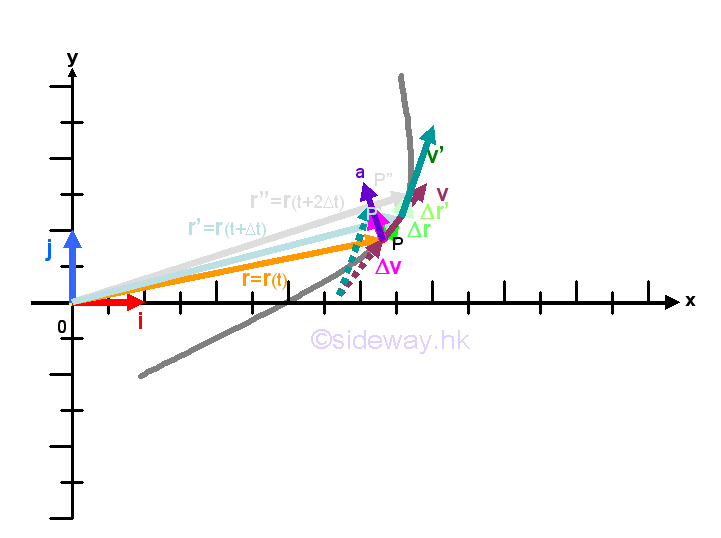
Since the velocity vector of the motion is alway tangent to the path, the vector function of the velocity vector does not have normal velocity component. However the vector function of the acceleration vector have both tangential and normal acceleration components such that the speed of the tangential velocity vector can be accelerated by the tangential component of the acceleration vector and the direction of the tangential velocity vector can be accelerated by the normal component of the acceleration vector. 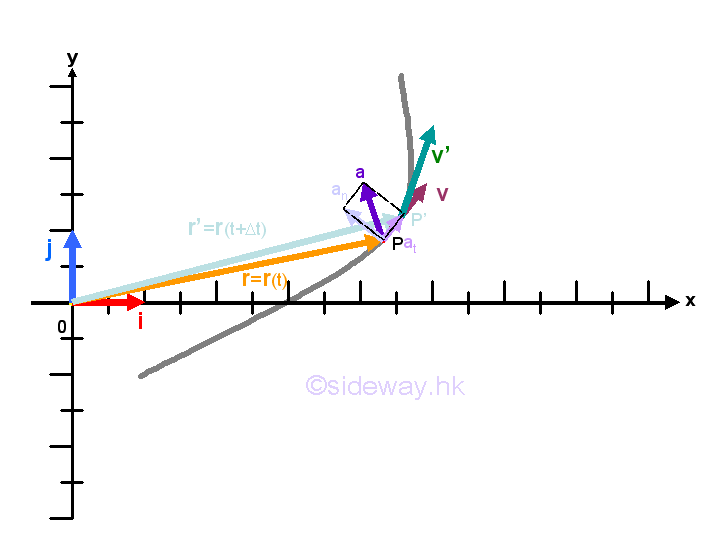
Let the unit vector tangent to the velocity vector v be et and the unit vector normal to the velocity vector v be en. Unlike the unit vectors i and j of the fixed frame of reference, the unit vectors et and en are translated and rotated simultaneously along the path of the motion. Assuming the motion of an object at position P at an instant of time t undergoes a motion of velocity v with an angle of θ relative to the x-axis of the fixed frame of reference. After time interval Δt, the object moves along the path with path length equals to Δs to position P' at which the object undergoes a motion of velocity v' with an angle of θ+Δθ relative to the x-axis of the fixed frame of reference at the instant of time t+Δt. Therefore both the magnitude and direction of the velocity vector is a function of angle c and in turn a function of time t. As the time interval Δt approaching zero, the path length Δs can be approximated by ρΔθ where ρ is the radius of curvature at position P and is appoximately equal to the radius of curvature at position P'. 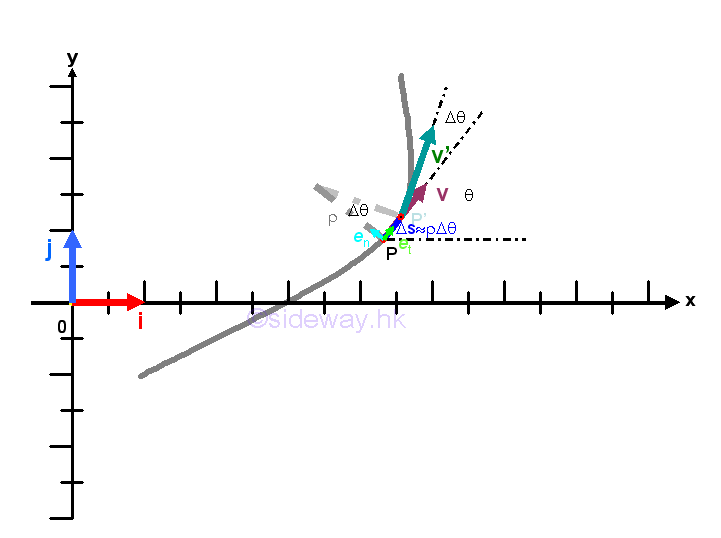
Therefore the velocity vector v at position P can be expressed in term of the tangential and normal unit vectors, that is v=0en+ vet where v is the scalar function of the velocity vector v tangent to the path and magnitude 0 is the scalar constant of the velocity vector v normal to the path at position P. As the velocity vector v does not have normal component, velocity vector v is equal to the product of the scalar function v and the unit vector et only, that is v=vet. The acceleration of the object at position P can be obtained by differentiating the velocity vector function with respect ot time t. Imply 
The acceleration vector a at position P can be decomposed into a tangential component function and a component function of the rate of change of the tangential unit vector et with respect to the angle c. In fact the rate of change of the tangential unit vector et with respect to the angle c when taking limit as Gc approaching zero is equal to the vector normal to the tangential unit vector et which implies that the acceleration vector a at position P can be resolved into a tangential component function and a normal component function. Graphically, the rate of change of a tangential unit vector et is 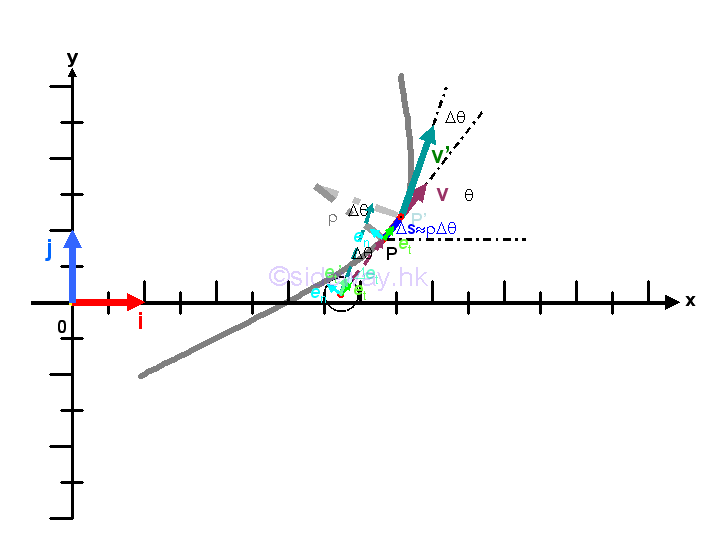
Since the rate of change of a tangential unit vector et when taking limit as Gc approaching zero is only due to a vector normal to the tangential unit vector et, with magnitude of the normal vector equals to 1, that is the rate of change of the tangential unit vector et with respect to the angle c when taking limit as Gc approaching zero is equal to the normal unit vector en. Imply 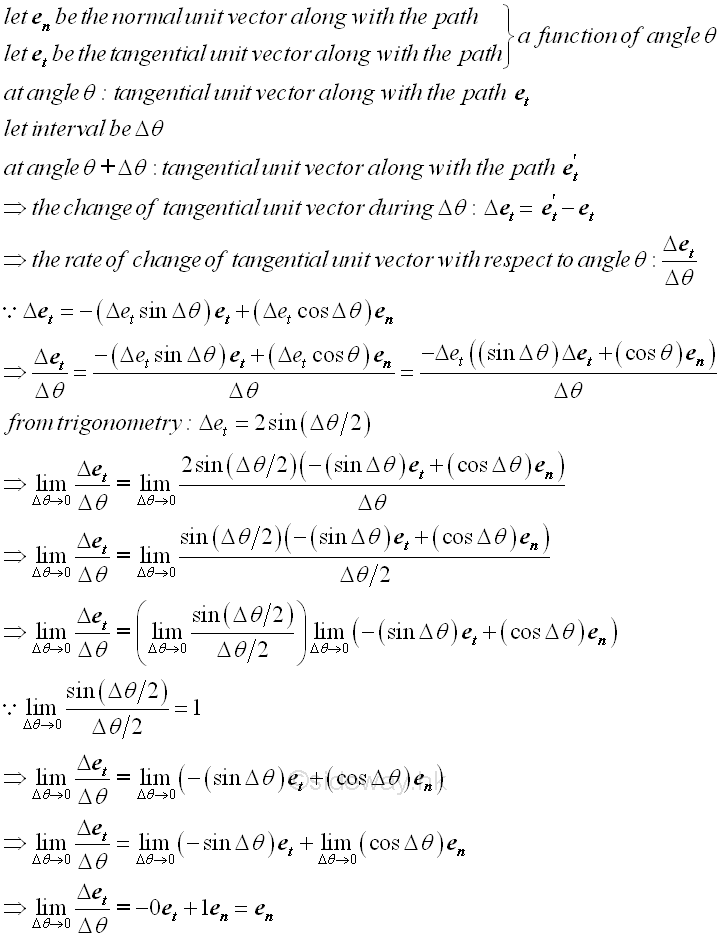
Therefore the acceleration vector a at position P can be resolved into a tangential component function and a normal component function. Imply 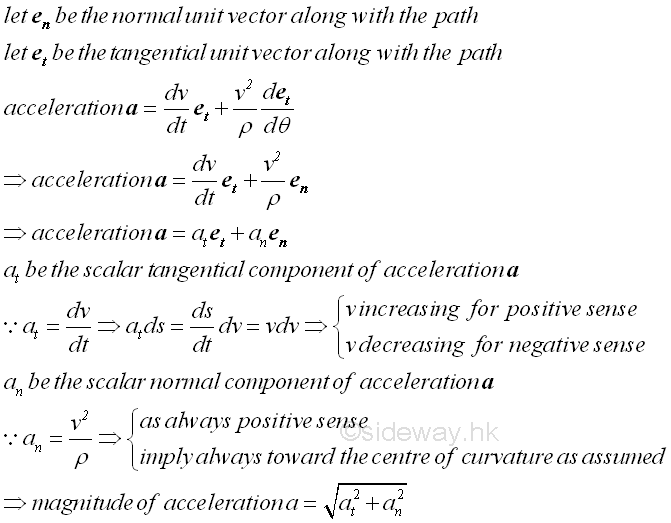
|
Sideway BICK Blog 06/03 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

